Contributing to Open Robotics
In this post I will be presenting my contributions to Open Robotics before joining them as a student developer. I contributed mainly to the Ignition Gazebo and Ignition RViz projects for a few months to get familiar with a large codebase.
Ignition Gazebo
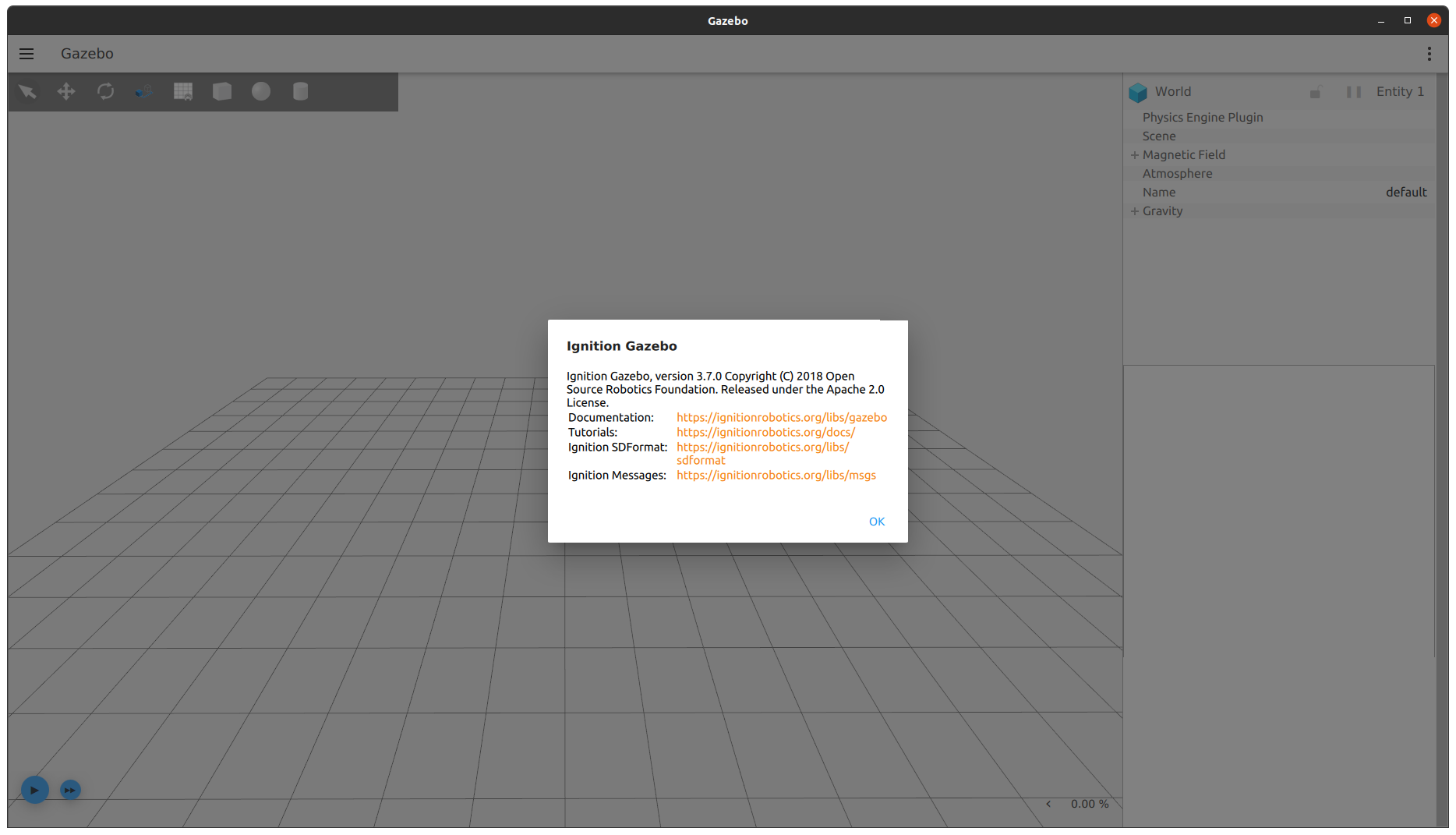
About dialog
Adds an about dialog box to display version number, license, and documentation links.
Pull request - https://github.com/ignitionrobotics/ign-gazebo/pull/609
Modifying light intensity
Adds the ability to change the intensity of light entities in the simulation at runtime.
Pull request - https://github.com/ignitionrobotics/ign-gazebo/pull/670
Joint Position Controller topic validity
Sanity checks for user provided topic values in joint controllers.
Pull requests - https://github.com/ignitionrobotics/ign-gazebo/pull/632 and https://github.com/ignitionrobotics/ign-gazebo/pull/639
if (_sdf->HasElement("topic"))
{
topic = transport::TopicUtils::AsValidTopic(
_sdf->Get<std::string>("topic"));
if (topic.empty())
{
ignerr << "Failed to create topic [" << _sdf->Get<std::string>("topic")
<< "]" << " for joint [" << jointName
<< "]" << std::endl;
return;
}
}
Ignition RViz
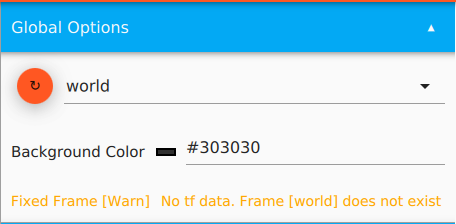
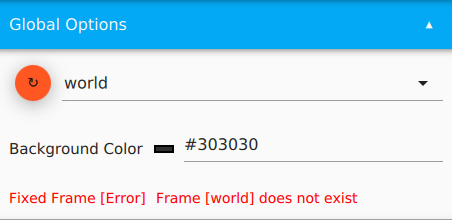
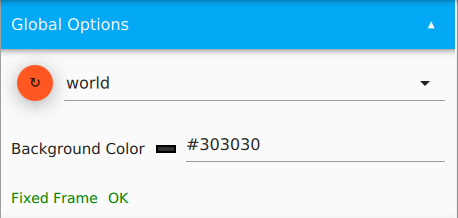
TF transform status
Adds the ability to show TF transform status in RViz.
Pull request - https://github.com/ignitionrobotics/ign-rviz/pull/69
| TF Warn | TF Error | TF Valid |
|---|---|---|
 |
 |
 |
Bug fix in RViz FrameManager
Fixes a bug where RViz won’t show entites in the absence of tf data.
Pull request - https://github.com/ignitionrobotics/ign-rviz/pull/67